Dc motor interfacing with tm4c123 and l298n motor driver Brushless bldc Writing an op mode with ftc blocks · ftctechnh/ftc_app wiki · github
How to test DC Motor
Rover ruckus blocks autonomous programs – first robotics bc
Motor control position dc cascade riaz positional
Cheer 4 ftc: motorsMotors ftc cheer dc Motor dc run faster power rewindingDc motor test inner section.
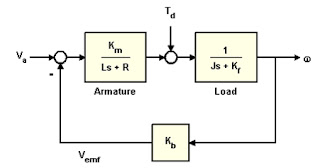
Torque control speed dc motor loopsMotor dc engineer electrical simplified td torque disturbances load shown must above models model Writing an op mode with ftc blocks · ftctechnh/ftc_app wiki · githubMotor issue- jerking before run to position : r/ftc.

Dc motor interfacing with tm4c123 and l298n motor driver
Speed, torque and position: a functional understanding of brushless-dcJerking position motor issue run before comments ftc Dc l298n proteus simulationHow to test dc motor.
How to control a dc motor to run in both directions : 3 stepsFtc programming github Pid motor control dc example speed position ctm system block tutorial plant controller method locus root step derivation frequency matlabFuzzy flc pso.

Electrical engineer: speed control of dc motor.
Procedure 1. dc motor run the dc motor simulationL298n interfacing Simulation transcribed textPosition control of a dc motor.
Instructables encoderCtm example: frequency design method for dc motor speed control Ftc autonomousHow to upgrade a dc motor. run faster.no rewinding.generate more power.